One of the projects that I am exploring at RC, is writing a UNIX shell. This is the first part of a series of posts that will eventually follow.
Disclaimer: I am not a subject expert on writing shells and I am sharing my findings as I learn more about this myself.
What is a shell?
A lot has been written about this, so I will not go into too much detail about the definition. However, in one line -
A shell is an interface that allows you to interact with the kernel of an operating system.
How does a shell work?
A shell parses commands entered by the user and executes this. To be able to do this, the workflow of the shell will look like this:
- Startup the shell
- Wait for user input
- Parse user input
- Execute the command and return the result
- Go back to
2.
There is one important piece to all of this though: processes. The
shell is the parent process. This is the main thread of our
program which is waiting for user input. However, we cannot execute
the command in the main thread itself, because of the following
reasons:
- An erroneous command will cause the entire shell to stop working. We want to avoid this.
- Independent commands should have their own process blocks. This is known as isolation and falls under fault tolerance.
Fork
To be able to avoid this, we use the system call fork. I thought I
understood fork until I wrote about four lines of code using it.
fork creates a copy of the current process. The copy is known as the
child and each process in a system has a unique process id (pid)
associated to it. Let’s take a look at the following piece of code:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int
main() {
pid_t child_pid = fork();
// The child process
if (child_pid == 0) {
printf("### Child ###\nCurrent PID: %d and Child PID: %d\n",
getpid(), child_pid);
} else {
printf("### Parent ###\nCurrent PID: %d and Child PID: %d\n",
getpid(), child_pid);
}
return 0;
}
The fork system call returns twice, once for each process. This
sounds counter intuitive at first. But let’s take a look at what goes
underneath the hood.
-
By invoking
forkwe are creating a new branch in our program. This is not the same as a traditionalif-elsebranch.forkcreates a copy of the current process and creates a new one out of it. The resulting system call returns the process id of the child process. -
Immediately after the
forkcall has succeeded, both the child and the parent process (the main thread of our code) are running simultaneously.
To give you a better idea of the program flow, take a look at this diagram:
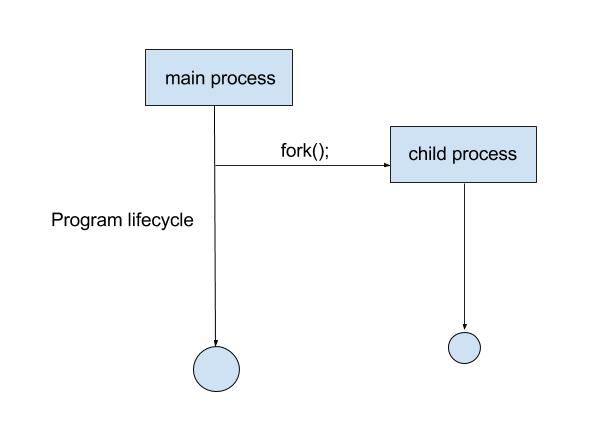
The fork() creates a new child process, but at the same time,
execution of the parent process is not halted. The child process
begins and finishes its execution independent of the parent and vice
versa.
A quick note before we proceed further, the getpid system call
returns the current process id.
If you compile and execute the code, you’d get an output similar to the following:
### Parent ###
Current PID: 85247 and Child PID: 85248
### Child ###
Current PID: 85248 and Child PID: 0
In the block under ### Parent ###, the current process ID is 85247
and that of the child is 85248. Note that the pid of the child is
greater than that of the parent, implying that the child was created
after the parent. (Update: As someone correctly pointed out on Hacker
News this isn’t
guaranteed, although the more likely scenario. Reason being that, the
OS could recycle older unused process ids.
In the block under ### Child ###, the current process ID is 85248,
which is the same as the pid of the child in the previous
block. However, the child pid here is 0.
Actual numbers would vary on each execution.
You’d be forgiven for thinking about how can child_pid assume two
different values in the same execution flow, when we have clearly
assigned a value to child_pid once on line 9. However, recall that
invoking fork creates a new process, which is identical to the
current one. As a result, in the parent process, child_pid is the
actual value of the child process that just got created, and the child
process itself has no child of its own, as a result of which the value
of child_pid is 0.
Thus, the if-else block we have defined from lines 12 to 16 is
required to control what code to execute in the child, vs the
parent. When child_pid is 0, the code block will be executed under
the child process, while the else block will be executed under the
parent process instead. The order in which the blocks will be executed
cannot be determined, and depends on the operating system’s scheduler.
Introducing determinism
Let me introduce you to the system call sleep. To quote the linux
man pages:
sleep – suspend execution for an interval of time
The interval is in seconds.
Let us add a sleep(1) call to the parent process, which would be the
else block of our code:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int
main() {
pid_t child_pid = fork();
// The child process
if (child_pid == 0) {
printf("### Child ###\nCurrent PID: %d and Child PID: %d\n",
getpid(), child_pid);
} else {
sleep(1); // Sleep for one second
printf("### Parent ###\nCurrent PID: %d and Child PID: %d\n",
getpid(), child_pid);
}
return 0;
}
And when you execute this, the output would be similar to:
### Child ###
Current PID: 89743 and Child PID: 0
and after a span of 1 second, you would see
### Parent ###
Current PID: 89742 and Child PID: 89743
And you will see the same behaviour each time you execute the
code. This is because we have made a blocking sleep call in the
parent process and the OS scheduler in the meantime finds free CPU
time for the child process to be executed.
Similarly, if you add the sleep(1) call to the child process
instead, i.e. the if block of our code, you will notice that the
output of the parent block immediately on the console. But you will
also notice that your program has terminated. And the output of the
child block being dumped into stdout. It looks like:
$ gcc -lreadline blog/sleep_child.c -o sleep_child && ./sleep_child
### Parent ###
Current PID: 23011 and Child PID: 23012
$ ### Child ###
Current PID: 23012 and Child PID: 0
The source for this is available in sleep_child.c.
This is because the parent process has nothing to do after the
printf statement, and is terminated. However, the child process is
blocked on the sleep call for one second after which the printf
statement is executed.
Determinism done right
However, using sleep to control your process execution flow is not
the best approach, because if you make a sleep call for n seconds:
- How do you guarantee that whatever it is that you are waiting for will
complete its execution within those
n seconds. - What if whatever it is that you are waiting for finishes much
sooner than
n seconds? In that case you are idling unnecessarily.
A better approach here would be using the wait system call instead
(or one of the variants). We will use the waitpid system call. It
takes the following parameters:
- Process ID of the process for which you want your program to wait.
- A variable which will be populated with information on how the process was terminated.
- Options flag, to customize the behaviour of
waitpid
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/wait.h>
int
main() {
pid_t child_pid;
pid_t wait_result;
int stat_loc;
child_pid = fork();
// The child process
if (child_pid == 0) {
printf("### Child ###\nCurrent PID: %d and Child PID: %d\n",
getpid(), child_pid);
sleep(1); // Sleep for one second
} else {
wait_result = waitpid(child_pid, &stat_loc, WUNTRACED);
printf("### Parent ###\nCurrent PID: %d and Child PID: %d\n",
getpid(), child_pid);
}
return 0;
}
When you execute this, you will notice that the child block gets
printed immediately and waits for a brief moment (we added the sleep
after the printf here). The parent process waits for the child to
finish execution after which it is free to execute its own commands.
That’s all for part I. All the code examples shown in this blog post are available here. In the next post, we will explore how to take a command as user input and execute it. Stay tuned.
Acknowledgements
Thanks to Saul Pwanson for helping me
understand the behaviour of fork and to
Jaseem Abid for reading drafts and
suggesting edits.